In 2019, more than 4.5 million people traveled by air every day worldwide and many of them arrived late because of weather. Up to 70% of air traffic delays are caused by instrument meteorological conditions (IMC), according to the FAA. The agency says clogs in the National Airspace System (NAS) not only inconvenience travelers, they also cost operators up to $4,500 per aircraft per hour. And such delays increase carbon emissions substantially.
As ceilings and visibilities go down, flight times go up. That’s been the story of instrument flying for nine decades. In IMC, pilots must maintain considerably greater separation from terrain, traffic and runway thresholds than in visual meteorological conditions (VMC). The greater the spacing must be in poor weather, the longer will be the traffic jams in the skies. The same poor visibility conditions also impede flows between runways and ramps. Everything on the surface slows to a crawl because pilots, ground controllers, ramp agents and line service people only can see what’s going on at a very short distance.
Equivalent Visual Operations in Flight
Mitre Corp.’s Equivalent Visual Operations (EVO) project is a suite of technologies that aims to slash weather-related delays, both in the air and on the ground, by providing VFR-like operating flexibility in IFR conditions. The five main thrusts are ADS-B In and Out, tight-tolerance RNAV RNP curved and segmented procedures, wake vortex prediction, enhanced flight vision systems (EFVS) and synthetic vision systems (SVS).
Satellite-based augmentation systems (SBAS), such as the FAA’s Wide Area Augmentation System (WAAS), have honed GPS position fixing accuracy to two meters. SBAS has been a key enabler for several EVO advances. ADS-B, for instance, uses SBAS to provide precision 3D position and velocity data. ADS-B Out, broadcasting at 1-sec. intervals, has been required for most aircraft flying in most controlled airspace since Jan. 1. That has been a boon for ATC because the FAA’s secondary surveillance radars (SSR) provide relative soft-target position fixing and only at 5-12-sec. intervals. Tighter precision and 1-sec. updates enable ATC to space aircraft closer to each other while maintaining much more robust safety margins than are possible with SSR. This increases traffic flow capacity, which is particularly useful in hub airport terminal areas that are prone to rush-hour traffic snarls.
Similarly, ADS-B In provides a considerably more accurate cockpit display of traffic information (CDTI) for aircraft that have the capability than TAS or TCAS traffic warning systems. While not mandated for the NAS, ADS-B In’s CDTI function improves situational awareness and it has demonstrated potential for time, fuel and emissions savings when used by pilots to maintain in-trail procedure spacing intervals.
RNAV RNP procedures, particularly approach procedures, offer some of the biggest benefits to increase traffic flow capacity. Many RNP procedures require SBAS or WAAS for tight tolerance navigation, putting aircraft on virtual monorails in the sky. This allows navigation procedure designers to route traffic around terrain, obstacles and noise-sensitive neighborhoods.
But most RNAV RNP procedures become unusable in low ceiling and visibility conditions as they lack the demonstrated 16-meter horizontal accuracy and 20-m vertical accuracy, plus 6.2-sec. time-to-alert, needed to qualify for 200-ft. ceiling/0.5-mi./RVR 2400 LPV minimums. Indeed, as many as 80% of all RNAV RNP procedures cannot be used when the weather drops below 800/1 approach minimums, according to Stedman Stevens, president of Vu Systems in Morrisville, North Carolina, and Nick Sabatini, former FAA associate administrator for aviation safety and now an aviation consultant.
When RNAV RNP procedures cannot be used, aircraft must be queued up in the conga line for Category I ILS or LPV approaches, causing substantial arrival delays. If the weather drops below 200/0.5, then only Category II or Category III precision approach procedures can enable aircraft to land. Special recurring Cat. II/III approvals for airport ILS equipment and approach lighting, avionics equipment and crew proficiency make them costly to maintain for the FAA, airport authorities and aircraft operators.
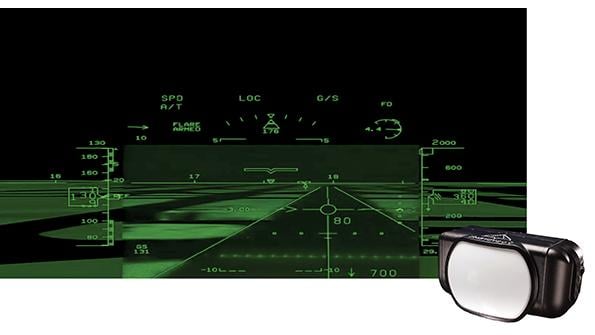
EFVS that the FAA has qualified for operational credit can be used by operators to fly down to lower minimums than would be possible using unaided vision. Plenty of claims have been made for infrared (IR) EFVS sensors, but the FAA bases the amount of operational credit on demonstrated “quantified visual advantage.” As of January 2020, only the Collins EVS-3600 (Bombardier Global 7500), Elbit/Universal EVS5000 (e.g. Dassault FalconEye), and Kollsman EVS-II (several Gulfstream jets, plus some Boeing twins and McDonnell Douglas trijets) and EVS-III (Gulfstream VII-500/-600) have been approved for 33% operational credit. For instance, if an approach has RVR 2400 published minimums, the above devices would enable an operator to fly down to RVR 1600 using EFVS. Operational credit bottoms out at RVR 1000, regardless of quantified visual advantage, in accordance with current rules.
Certificated FAR Part 121, 125 and 135 air carriers need OpSpec C048 EFVS authorization. Part 91 operators may apply for C048 letters of authorization (LOA) to pave the way for approvals by foreign civil aviation authorities. If a Part 91 operator want to use EFVS for landing and roll-out in lieu of natural vision, a C048 LOA is required.
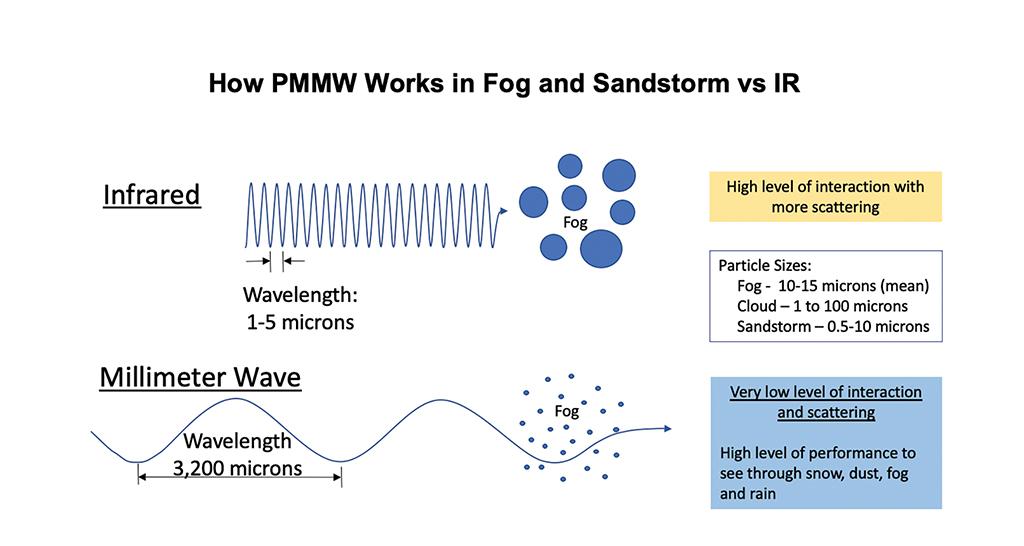
However, as shown in the accompanying graphic, fog, rain or cloud can blunt or blind conventional IR sensors that detect radiation in the 1-5-micron (60-300 THz) band, thus eliminating quantified visual advantage. Moreover, these sensors do not detect radiation from LED lights as they emit very low or no IR energy, also negating visual advantage.
Recent advances in EFVS, though, promise a weather breakthrough. Vu Systems, for instance, is developing the Vu Cube, a passive millimeter wave (PMMW) sensor that operates in the 3,200-micron (93.7-GHz) band. The system has been in development for seven years and Stedman only went public with it at last year’s NBAA convention. It capitalizes on recent monolithic microwave integrated circuit development (MMIC or “mimic” for short) devices that are used in consumer electronics, such as mobile phones, home satellite receivers and fiber-optic communications.
Similar to IR cameras, the PMMW Vu Cube detects small [+/-1C] temperature differentials between pavement, objects and their surroundings. The surface temperature of a paved runway, for instance, is quite different than the soil or grass that surrounds it.
But as PMMW uses much longer wavelengths than IR, the thermal radiation it detects is not attenuated significantly by clouds or precipitation. Thus, PMMW has the potential to provide a 2-plus-mi. visual advantage over the naked eye, thereby enabling pilots to see both the runway threshold and the entire runway length well outside published minimums almost all the time, Stedman asserts.
As illustrated, the image quality of PMMW is low resolution compared to the crisp video provided by IR. But when used as part of a head-up display (HUD) combined vision system (CVS) that blends synthetic vision, PMMW and IR EFVS, it can be an effective tool for meeting the EFVS requirements of Part 91.176(b) for identifying the runway threshold and touchdown zone from published DA/DH minimums down to 100 ft. above touchdown zone elevation. And then, in accordance with Part 91.176(a), it can be used to continue down to touchdown and rollout by making the threshold and touchdown landing surface “distinctly visible and identifiable to the pilot.” Sabatini and Stedman are confident a combined HUD CVS using the Vu Cube will meet the requirements for EFVS in spite of its low-resolution imagery.

Stedman believes advances in MMIC processing capabilities in radiology, among other high-tech industries, will enable Vu Systems’ engineers to refine image quality with future operating system updates. For now, though, IR cameras can provide considerably higher resolution video in most weather conditions once the aircraft is on short final. That’s why the company is developing a combined SVS plus PMMW and IR EFVS equipment package for HUDs.
EFVS technology now is progressing so rapidly that the aviation industry recognizes the need to update the regulations. The RTCA’s Special Committee 213 is formulating new minimum aviation system performance standards (MASPS) for EVS, EFVS and CVS. SC 213 proposes lowering the visibility floor on all straight-in approaches to RVR 600 from RVR 1000 if the runway has high-intensity runway lighting, touchdown zone lighting and centerline lighting. The committee also plans to reduce EFVS minimums to below RVR 600 if the aircraft is capable of aided (guided) rollout to taxi speed.
In contrast to Cat. II/III operations, all the current and proposed EFVS regulations require no special authorization or training outside of Part 61.66 initial ground and flight simulator training, along with logging six approaches using EFVS every six months. The EFVS rule essentially follows Part 61.57 instrument flight currency rules. Thus, in the future, operators will not need to undergo the rigors of Cat. II/III qualification to fly down to the same RVR minimums — or even zero RVR.
Equivalent Visual Operations on the Ground
Successfully arriving on the runway in low-visibility conditions is not the only challenge in inclement weather. Pilots also need to know whether they can then find their way to the ramp.
Honeywell is developing a group of technologies for ground operations in low visibility conditions that complement Mitre’s EVO in the air. Its new Runway Overrun Advisory and Alerting System (ROAAS) offers impressive potential to help prevent runway excursion mishaps. The May 2020 runway overrun of Air India Express Flight 812 at Mangalore International Airport and the August 2019 crash of a Cessna Citation Longitude at Elizabethton, Tennessee, accentuate the need for ROAAS and similar dynamic energy assessment tools on flight decks.
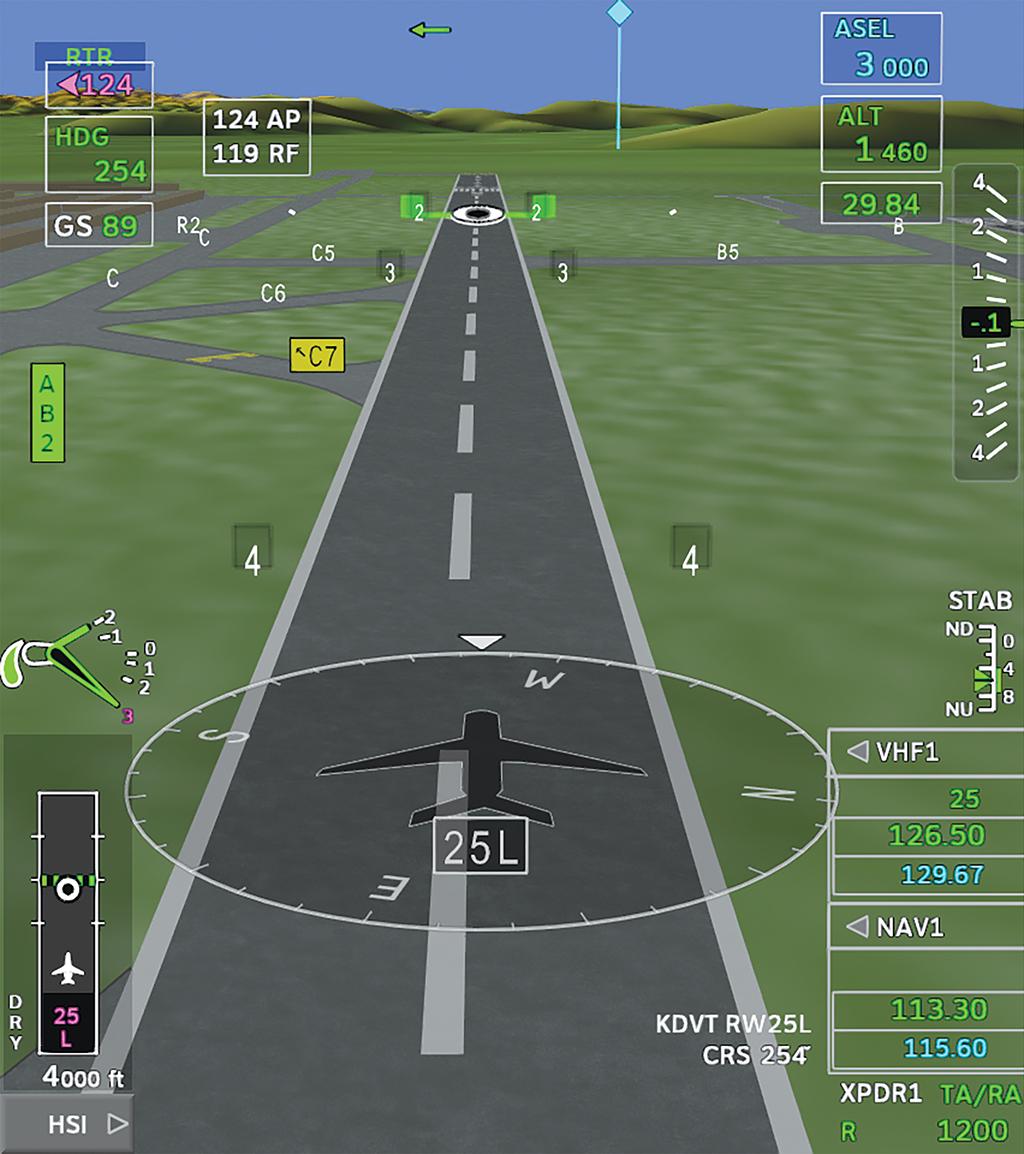
ROAAS uses aircraft ground speed, predicted touchdown point, RCR, runway available and runway remaining, among other factors, to estimate stopping distance. A window on the lower left of the PFD displays a diagram of the landing runway with a series of green dotted lines showing the computed stopping point. In this case, the aircraft is landing on 7,200-ft.-long Runway 25L at Phoenix Deer Valley Airport. The green dotted line shows the aircraft will stop easily in about 4,800 ft. The second illustration is Honeywell’s exocentric primary taxi display (PTD) that automatically replaces the PFD after landing touchdown. The lower left ROAAS inset window shows the aircraft already has slowed to 89-kt. ground speed and that it will stop well within the 4,000 ft. of pavement remaining. The green line and virtual signs across Runway 25L on the exocentric view also show the stopping point.
The exocentric PTD is part of a 3D airport moving map (AMM) system with which we first flew on a Gulfstream G500 equipped with a Symmetry flight deck powered by Honeywell Epic. “Pilots get tired of taxiing in the dirt” as shown on most synthetic-vision PFDs, says Thea Feyereisen, Honeywell’s senior engineering fellow, adding, “The most challenging part of many flights is taxiing.” The 3D AMM shows runways, taxiways, ramps, buildings, obstacles, hotspots and signage to promote situational awareness on the ground.
And now, ADS-B In will be added to 3D AMM to show proximate traffic on the ground and in the air that potentially could pose a collision hazard. In this illustration, our aircraft has just turned eastbound from Honeywell’s ramp onto Taxiway C at Phoenix Deer Valley. The peach-colored symbols near the departure end of Runway 7R show four ADS-B-equipped aircraft in the run-up area. The three cyan-colored diamonds, with tethers that depict their height above terrain, are aircraft broadcasting ADS-B Out on final approach to Runway 7R.
Eventually virtually all vehicles, maintenance equipment and movable obstacles will have an ADS-B Out capability, enabling pilots to spot fuel trucks, service carts and even lawnmowers on the PTD.
For retrofit applications, Honeywell also is developing 2-D and 3-D AMM and interactive taxi diagrams with ADS-B In traffic as an iPad app. Another long-term goal is to add D-Taxi CPDLC graphic depictions of taxi instructions from ground control so that pilots need only “roger” a complex assigned taxi route and then follow the magenta line as though it were an FMS flight plan route in the air. Even longer term will be graphic depiction of airport NOTAMs on taxi diagrams, helping pilots spot taxiway closures, construction zones, inoperative lighting, and obstacles, such as cranes.
EVO Is Critical to Next Gen
Accommodating more aircraft, reducing delays and saving fuel are major goals of the FAA’s next-generation air traffic management system. EVO is a critical component because aircraft can be spaced closer together, allowing them to operate from landing facilities with VFR flexibility in IFR conditions, providing safety margins that are better than today’s ATC system.

Pilots often say, “OK, draw me a picture.” EVO does just that. It promises considerably better situational awareness than provided by the naked eye, even in VMC, because it can detect and display hazards and conflicts well beyond visual range. ADS-B In provides that capability in all weather conditions. Advanced EFVS equipment, such as PMMW sensors, enables pilots to see runways miles well before they have to make go/no-go decisions on final approach.
Beyond-visual-range EVO, however, is in its infancy. For instance, Honeywell has long-term plans to crowdsource aircraft weather radar data, aggregating them from several aircraft by means of its Connected Radar data-link app tapping into the 3-D scanning “Intuvue” RDR-4000 and -7000 weather radars on participating aircraft. Imagine having access to the weather radar returns, plus lightning, hail and turbulence information, from a half dozen aircraft flying between the Northern and Southern Hemispheres, all sharing data to spot and skirt major thunderstorms and mesocyclones in the Intertropical Convergence Zone.
One of the NASA Langley Research Center’s ultimate goals is to attain a “better than visual” operational capability, providing all of the traffic flow capacity of VMC while improving on the safety of flying VFR. SVS and EFVS draw pictures on cockpit displays, providing virtual VFR windows to the outside world regardless of weather or darkness. HUDs are even more effective at keeping pilots in the loop when they have synthetic- and enhanced-vision background imagery. NASA Langley researchers Lance Prinzel, Linda Kramer and Christopher Wickens believe virtual VFR approaches using HUDs with SVS and EFVS can be flown down to RVR 300 visibility.
Beyond EVO’s clear operational benefits, the equipment should buy its way onto many aircraft because of the operational cost savings. Reducing or eliminating weather delays will provide a fortune in savings every year. Not having to equip, maintain and train for Cat. II/III approvals will also shave costs.
Business aviation has been the first to embrace new avionics technologies for decades, well ahead of equipage mandates by regulators for airlines. Ergo, it’s reasonable to assume airframe manufacturers, such as Dassault and Gulfstream, will be EVO pioneers, based upon what they’ve installed on the flight decks of current production aircraft. The confluence of SVS/EFVS, ADS-B In, and 2D and 3D interactive airport moving maps, among other emerging technologies, promises to make flying safer, more efficient, greener and more comfortable. And as in the past, they will debut on business aircraft, letting other sectors play catch-up.

Related Content





Comments